以前找 moe.one 要了一个 TG 新帖推送插件,我上 TG 上的少没细心关注,这几天才发现这个推送机器人抽风很厉害,不能做到实时推送,中间会间隔一堆才推一次,看不懂代码逻辑,于是自己在网上找了 RSS 订阅 BOT 部署,试了两个用的人多的项目,都是 docker 部署,我想改改消息格式都不知道怎么下手,实在对 docker 不懂... 默认的消息格式让我强迫症实在难受,于是让 AI 配合写了如下 Python 脚本,此文记录一下搭建步骤,避免以后有需要时又要去找 AI 掰扯。
打开服务器终端,安装 Python 和所需库
安装 pip
更新包列表:
安装 python3-pip:
安装完成后,确认 pip 是否正确安装:
正常会返回 pip 的版本信息。
安装所需库
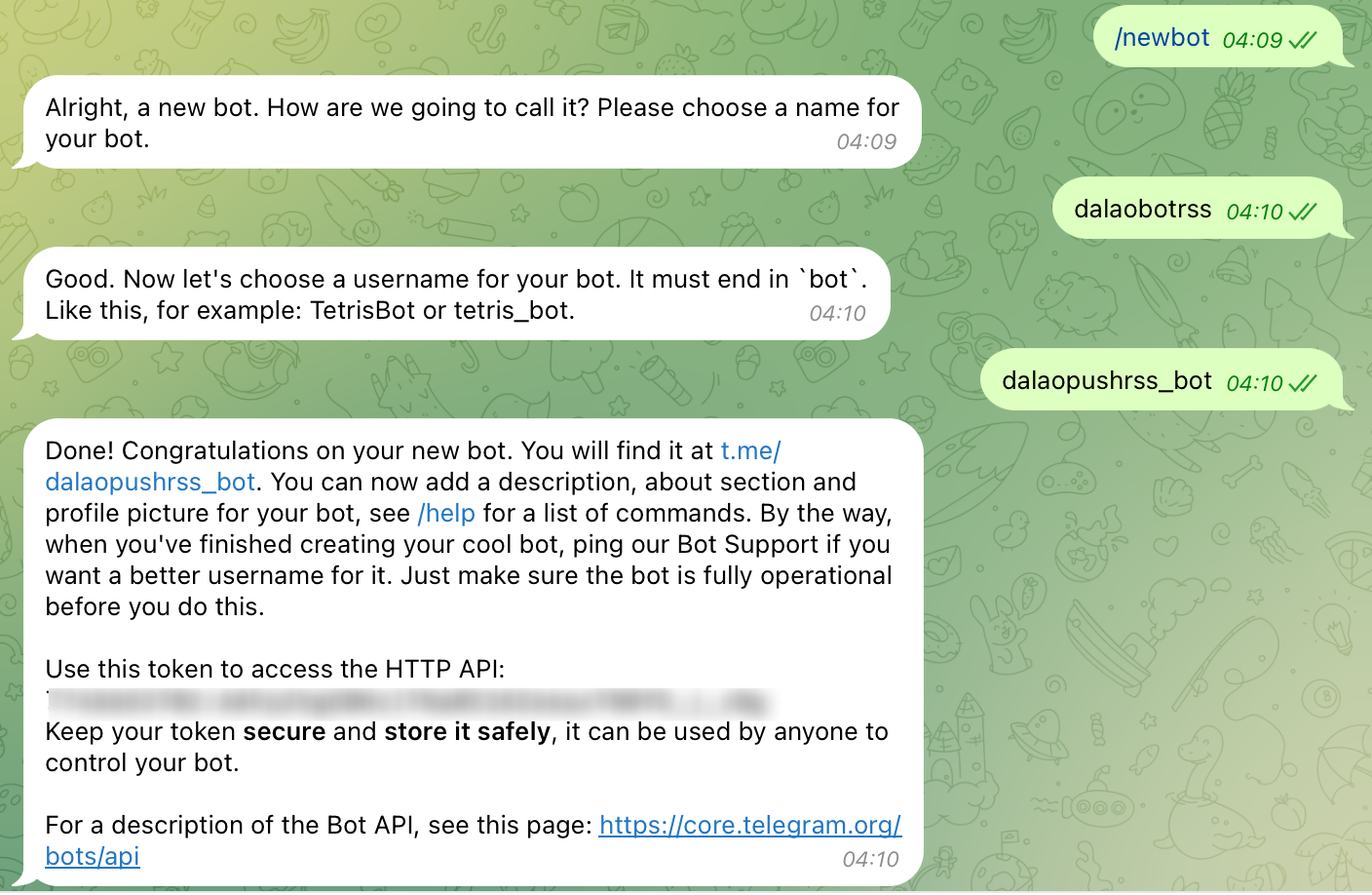
下一步,我们需要去 Telegram 创建 Bot,在 TG 里搜索 @BotFather,进入对话框,输入 /newbot 以创建新机器人,然后回复一个机器人名字,再回复一个机器人的用户名,需要带 bot,可以参考截图设置:
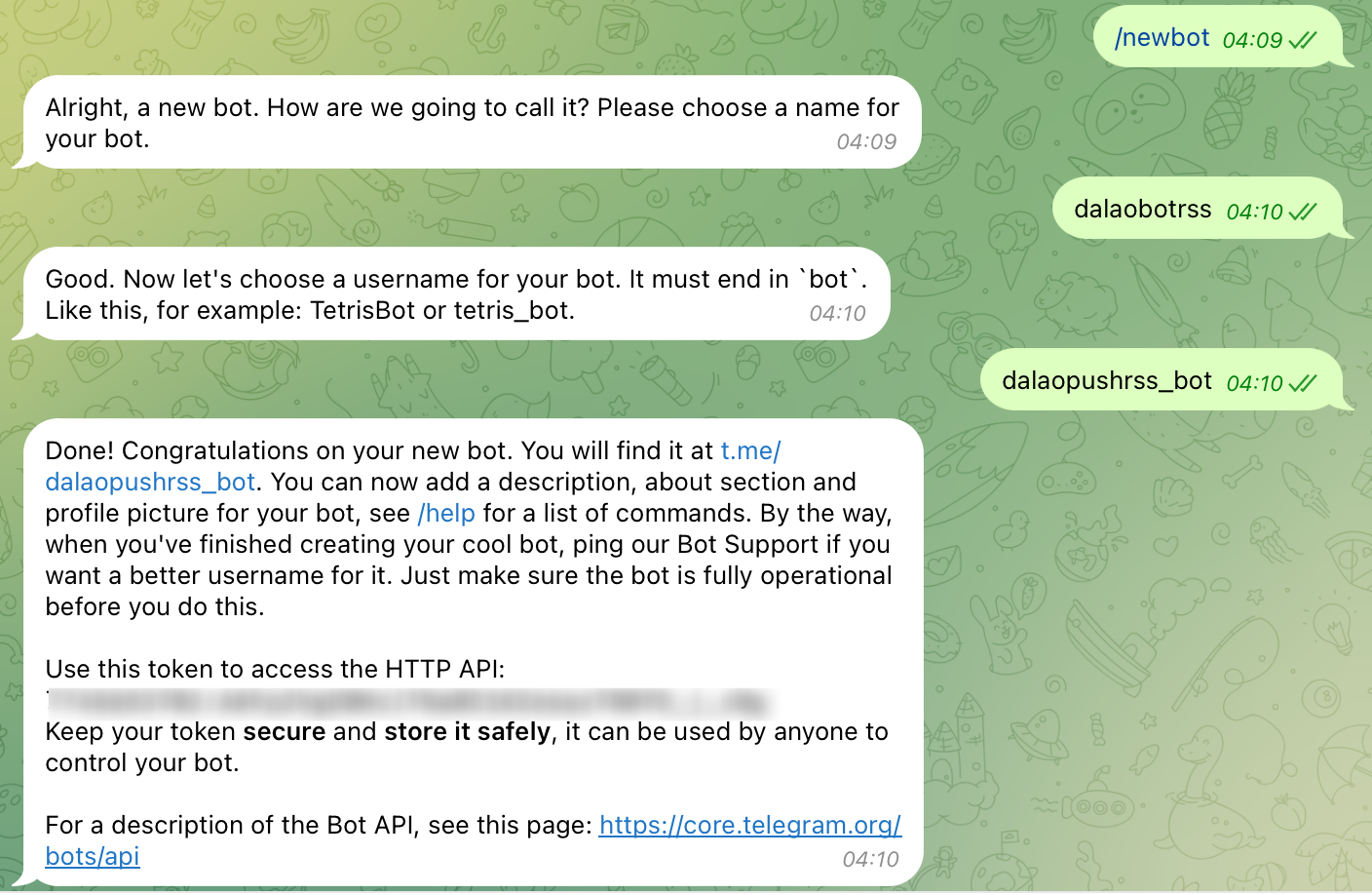
@BotFather 会回复你一个机器人的 HTTP API,保存它,后面会用到。
进入刚刚创建的机器人对话框,将他拉进一个你需要推送的群,或者直接给你自己推送也行,拉群记得给它管理员和消息权限。
TG 搜索 @get_id_bot,进入对话框点击右上角,将他拉到刚刚的群里,在群聊对话框输入:/my_id@get_id_bot 发送,会得到一个 - 开头的群聊 ID,记录它,包括 - 符号。

信息获取完成,接下来就是创建脚本了,回到服务器终端
- 创建目录
假设创建一个名为 dalaorss 的目录:
- 创建 Python 文件
在 dalaorss 目录中,创建一个 Python 文件,这里使用 nano 编辑器创建一个名为 rss_bot.py 的文件:
- 添加代码
将下面代码复制进脚本中,注意修改为你的信息
- 保存并退出
在 nano 编辑器中,按 Ctrl + O 保存文件(字母 O 不是数字 0),然后按 Enter 确认,接着按 Ctrl + X 退出编辑器。
- 运行脚本
nohup(no hang up)命令可以让脚本在后台运行,即使您关闭终端会话也能保持运行。
现在就可以去更新 rss 看看推送状态了,这里的脚本内容以我自己论坛为例,如果你也是 xiuno 论坛那么照抄就行,如果是博客或者其它程序,可能还需要做一些修改。
推送效果:
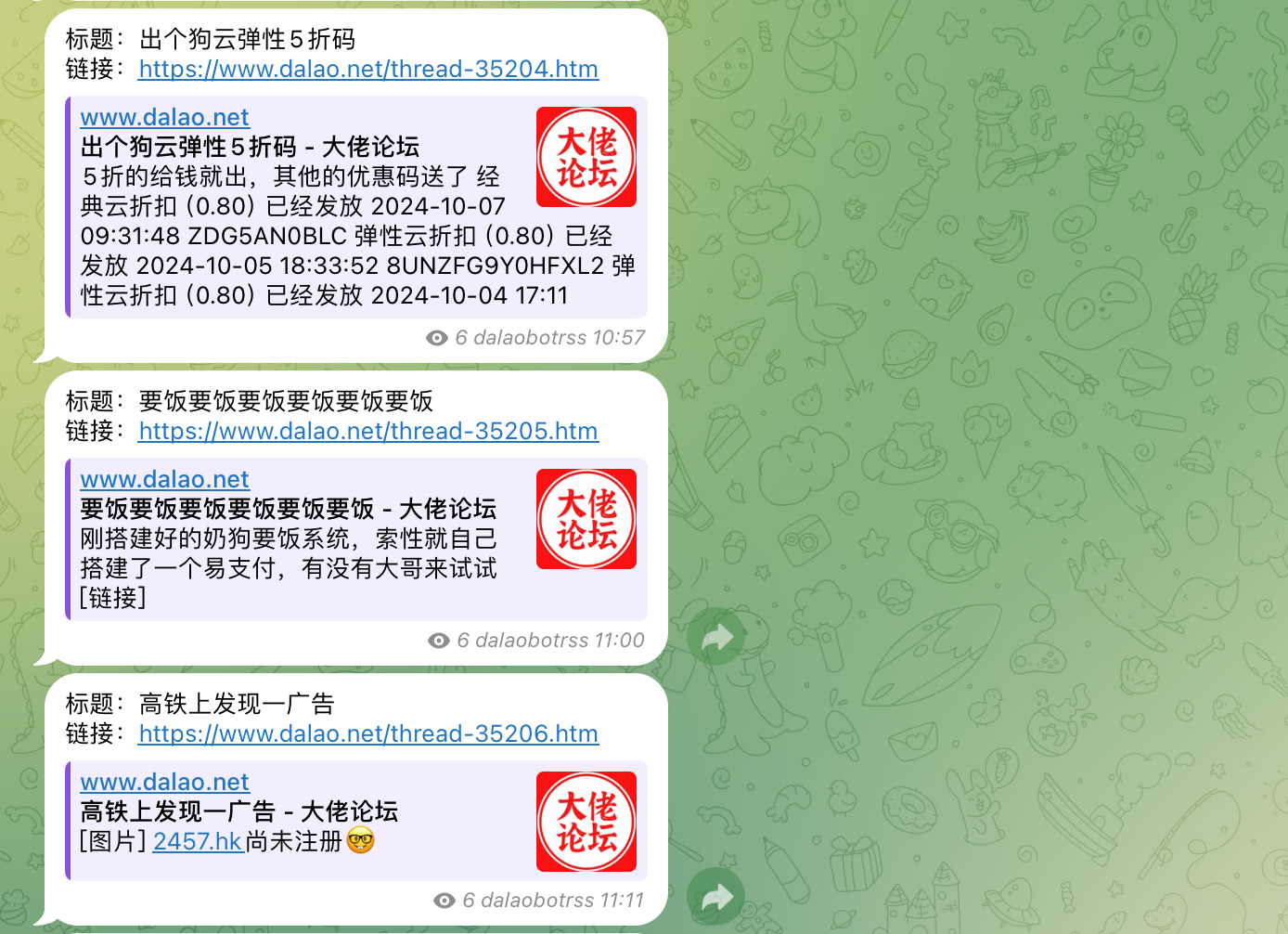
个人比较喜欢这种格式,如果你喜欢别的模式比如消息内预览,可以使用 docker 版本的,网上搜一下就有。
脚本运行后,怎么查看或关闭:
检查当前运行的进程
会得到正在运行的进程,查看到 rss_bot 那条,最前面有一个 ID,命令行输入
即可停止。
查看输出日志